Deep Generative Dual Memory Network for Continual Learning
Nitin Kamra, Umang Gupta, Yan Liu
Posted on November 27, 2017
TL;DR: A dual memory architecture inspired from human brain to learn sequentially incoming tasks, while averting catastrophic forgetting.
This post summarizes our paper Deep Generative Dual Memory Network for Continual Learning. We present a method to learn tasks sequentially without forgetting previous ones, inspired by the human brain.

Image credits: http://www.sciencecodex.com/files/040215%20Modular%20brains.jpg
Catastrophic Forgetting
Neural networks suffer from catastrophic forgetting—they forget previously learned knowledge when trained on new tasks. To solve this, a system must be able to learn continuously from incoming data without needing to store and retrain on all past data.
Neuroscientific evidence suggests the human brain avoids this using Complementary Learning Systems (hippocampus for rapid learning, neocortex for long-term consolidation) and Experience Replay (consolidating memories during sleep). We mimic this structure to enable continual learning in AI.
Formal Setup
We address sequential multitask learning, where a model learns a sequence of tasks \(\mathbb{T}\) one by one. The goal is to minimize test loss on all tasks seen so far, assuming a finite memory (\(N_{max}\)) that prevents storing all training examples.
Deep Generative Dual Memory Network (DGDMN)
We propose the DGDMN, a dual-memory model comprising:
- Short-Term Memory (STM): Modeled after the hippocampus. It consists of small, task-specific Deep Generative Memories (STTMs) that adapt quickly to new tasks.
- Long-Term Memory (LTM): Modeled after the neocortex. It is a large Deep Generative Memory that consolidates knowledge from the STM.
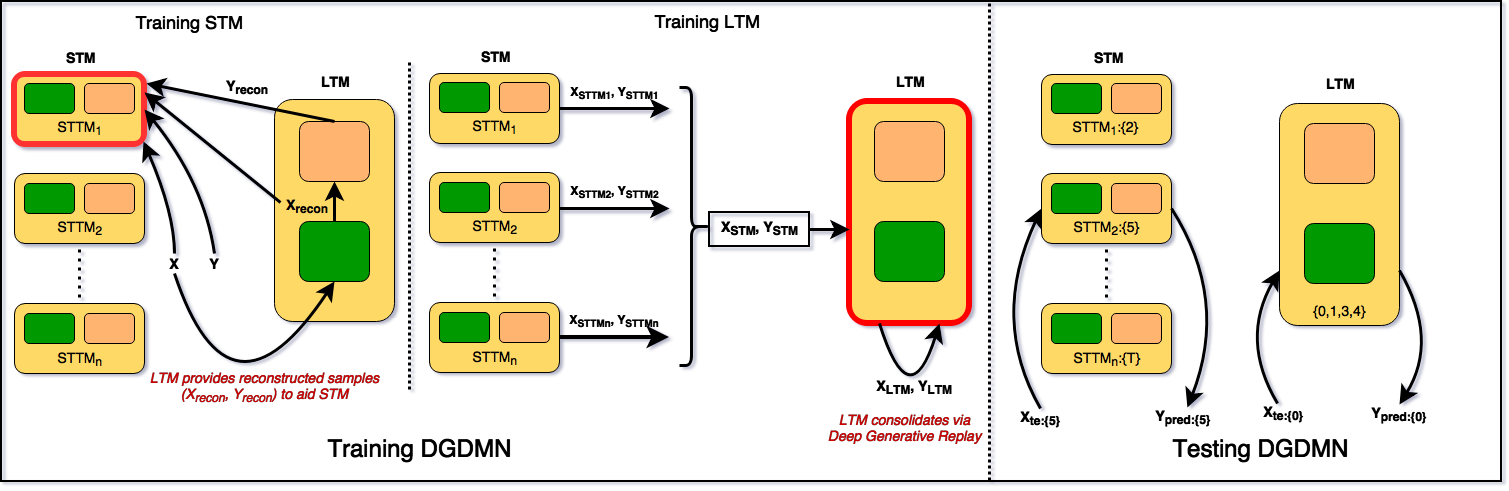
Figure 2: Deep Generative Dual Memory Network
Generative Experience Replay: Instead of storing raw samples, we use generative models (VAEs) to store and replay experiences. This allows us to generate representative samples of past tasks within a fixed memory budget.
The Learning Cycle:
- New tasks are learned quickly in the STM.
- During "sleep" periods (when STM is full), the STM generates samples of its tasks.
- These samples are transferred to the LTM, which consolidates them with its existing knowledge via generative replay.
Results
We evaluated DGDMN on sequential image classification tasks (Permnist, Digits, TDigits) against baselines like EWC and Pseudopattern Rehearsal (PPR).
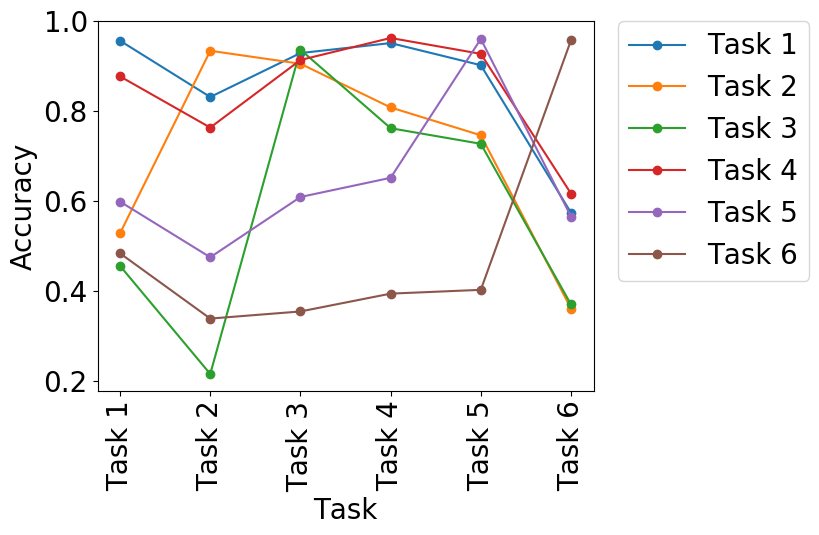
(a) PPR on Permnist |

(b) EWC on Permnist |
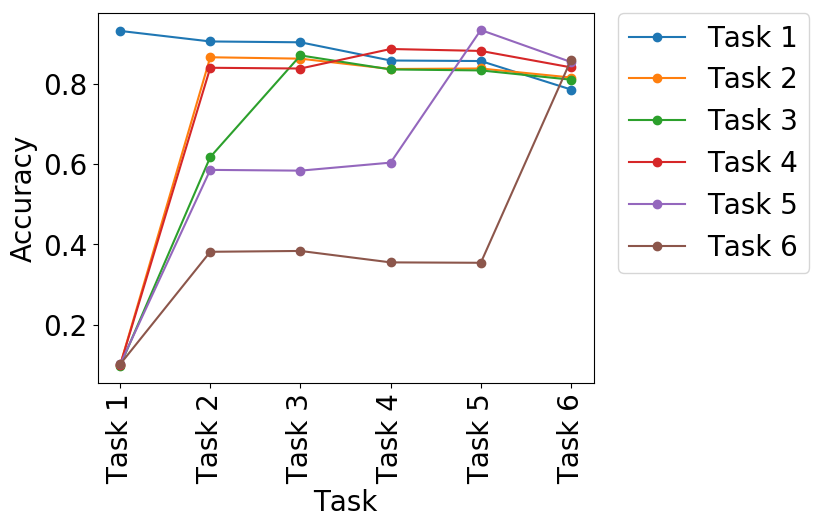
(c) DGDMN on Permnist |

(d) PPR on Digits |

(e) EWC on Digits |

(f) DGDMN on Digits |
Figure 3: Accuracy curves. DGDMN (c, f) retains performance on previous tasks significantly better than baselines.
Performance: DGDMN consistently outperforms baselines, retaining higher average accuracy on previous tasks. Unlike EWC which stagnates, or standard networks which catastrophically forget, DGDMN's dual memory allows it to learn new tasks while preserving old ones (Figure 3 & 4).
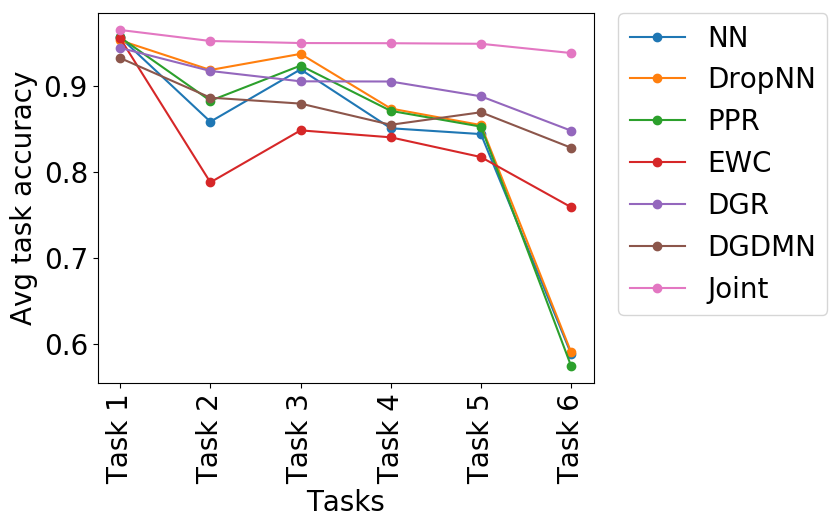
(a) Permnist |

(b) Digits |
Figure 4: Average forgetting curves. DGDMN maintains higher average accuracy as more tasks are added.
Long Sequences and Training Time: On a longer sequence of 40 tasks (TDigits), DGDMN shows much more gradual forgetting compared to a single Deep Generative Replay (DGR) model. Crucially, DGDMN is an order of magnitude faster to train (Figure 5c) because it consolidates to LTM only periodically, rather than after every task.

(a) Avg accuracy (all tasks) |

(b) Avg accuracy (last 10) |
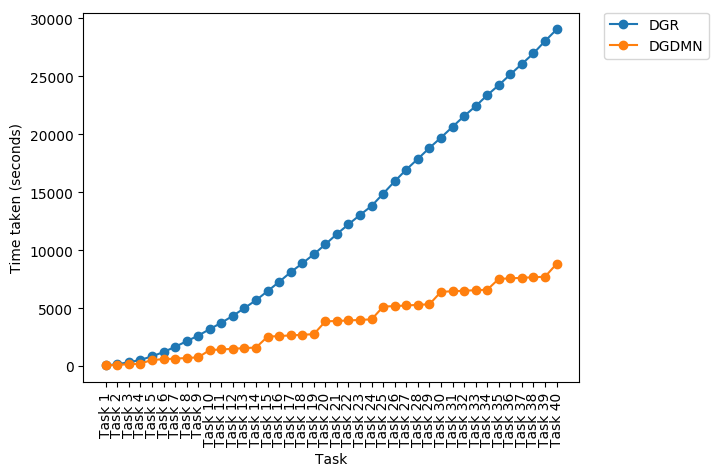
(c) Training time |
Figure 5: DGDMN vs DGR on 40 tasks. DGDMN forgets slower and trains much faster.
Robustness: Using VAEs provides resilience to noise and occlusion. The reconstruction step acts as a denoiser, allowing the model to recognize corrupted inputs better than standard networks (Figure 6).

(a) Reconstruction |
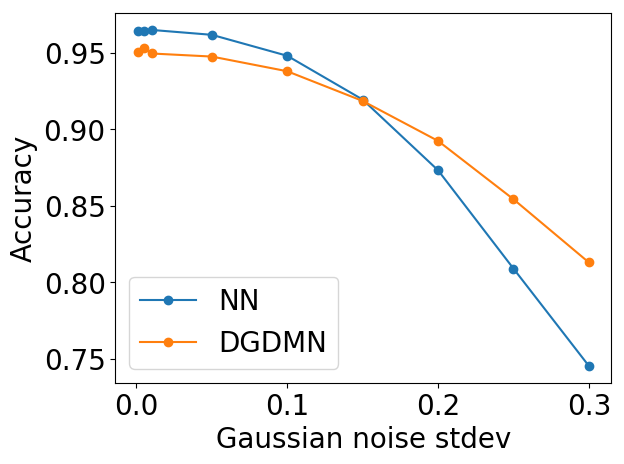
(b) vs. Noise |

(c) vs. Occlusion |
Figure 6: Robustness to noise and occlusion.
Conclusion
DGDMN successfully emulates the human brain's dual memory system to learn sequentially without catastrophic forgetting. By combining an STM for fast learning and an LTM for consolidated knowledge, supported by generative replay, it offers a robust and efficient solution for continual learning.
References
[Kirkpatrick et al., 2017] Overcoming catastrophic forgetting in neural
networks. PNAS.
[Benna and Fusi, 2016] Computational principles of synaptic memory
consolidation. Nature neuroscience.
[Goodfellow et al., 2015] An empirical investigation of catastrophic
forgetting in gradient-based neural networks. arXiv.
[Yang et al., 2014] Sleep promotes branch-specific formation of
dendritic spines after learning. Science.
[O'Neill et al., 2010] Play it again: reactivation of waking experience
and memory. Trends in neurosciences.
[Robins, 2004] Sequential learning in neural networks: A review and a
discussion of pseudorehearsal based methods. Intelligent Data Analysis.
[McClelland et al., 1995] Why there are complementary learning systems
in the hippocampus and neocortex. Psychological review.